www.rz-journal.de - © by by Bernhard Kletzenbauer und Perry Rhodan - published in PR 1256 - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt
Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig.
|
Terranische
Alltagstechnik |
|
|
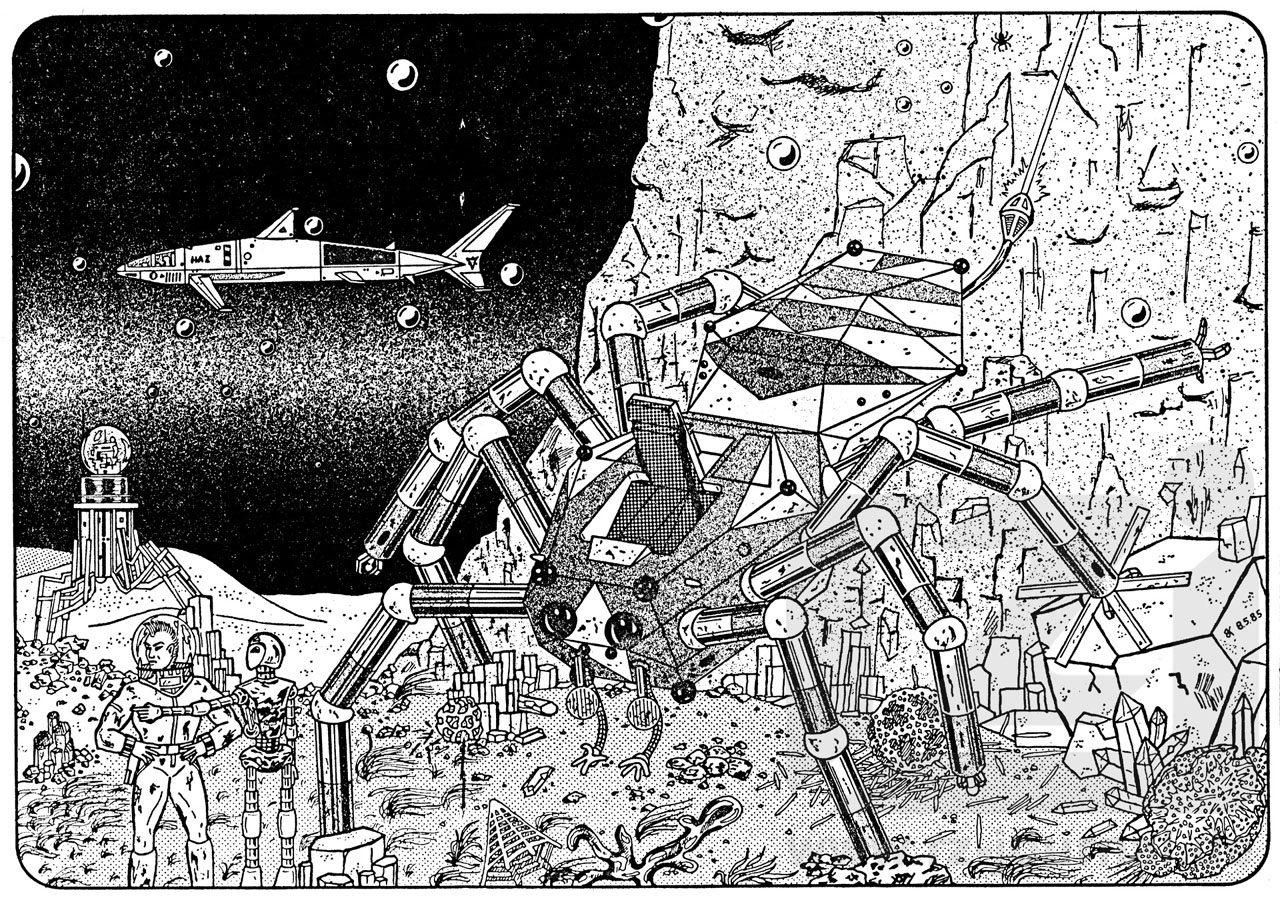
Die Abbildung zeigt einen Roboter des Typs AMOR II während der zweijährlich stattfindenden Wettkämpfe auf dem Mond „Outland“, der in seiner Wasserstoffatmosphäre eine niedere Flora und Fauna entwickelt hat. Der Transportroboter hat sich gerade von einer hohen Steilwand herabgelassen und dazu aus dem Hinterteil das 50 m lange Sicherheitskabel mit Gravoanker ausgefahren. Da das Seil nicht ausreichte, wurde mit dem Projektionskopf im Gravoanker ein Traktorstrahl erzeugt, an dem sich AMOR herablassen oder hinaufziehen kann. Der Reiter erhält neue Anweisungen für die Rallye von einem verchromten Universalroboter in Modulbauweise. Im Hintergrund steht ein unbemannter Geländerobot, der für eine Medienagentur Hologrammaufnahmen des Rennens liefert. Der vorbeifliegende Hochgeschwindigkeits-Aufklärer I wird ebenfalls zu Reportagezwecken eingesetzt. Die bisher 5 AMOR-Typen der Spider-AG (Nr. Ill-V sind Lastentransporter) sind ein Exporthit der Kolonie „Web 2“, deren harte Umgebungs- und Witterungsbedingungen die Entwicklung eines exotischen Fortbewegungsgerätes erforderten. Als Vorbild diente die dort heimische Springspinnenart, die bis zu 1 m hoch wird. AMOR ist ein 1 -Personen-Geh-Fahrzeug mit einfachem Universalsitz und aufklappbarer Rückenlehne mit Gurten. Die Lenkung erfolgt durch akustische Verständigung oder mittels CAT-Helm (Computergesteuerte Auswertung von Telepathie). Bei den Wettkämpfen werden Rennen und Tänze auch mittels Spezialjoysticks gesteuert. Im allgemeinen Anwendungsfall sucht sich AMOR jedoch selbständig seinen Weg und wählt dementsprechend die günstigste Gangart (von 8 bis 2 Beinen) aus. Die Bewegungskoordination besorgt ein siganesischer Hochleistungscomputer auf rein elektronischer Basis (also ohne Bio-Plasma), der mit den Asimovschen Robotergesetzen ausgestattet ist. AMOR ist, bei 1 Gravo, aus dem Stand zu Sprüngen vom 8 - 10fachen seiner Körperlänge imstande. Bei der Höchstgeschwindigkeit von 400 km/h fallen diese Sprünge noch weiter aus. Auch im Hochsprung zeigt der Roboter beachtliche Leistungen, die mit dem kleinen Antigravgenerator, der AMORS Gewicht ausgleicht, noch gesteigert werden können. Andruckabsorber sorgen dabei für die Bequemlichkeit des Passagiers. Das „Gesicht“ enthält 8 Kameraaugen zur optischen Umwelterfassung im Bereich von Infrarot bis Ultraviolett. Weitere Kameras am Körper gewähren dem Computer Rundumsicht, und in den 2 seitlichen Kegeln sind Ortungs- und Tastergeräte untergebracht. Die Daten können in einem Hologrammspeicher von hoher Aufnahmekapazität festgehalten werden und (z.B. bei Dunkelheit) simultan auf einem Monitor dem Passagier übermittelt werden. Unter den schwenkbaren Hochleistungsscheinwerfern befinden sich 2 Greifhände an flexiblen Armen. Auch die 8 Füße enthalten je 3 Greifklauen. In Sumpfgelände können 6 Schienen an jedem Bein aufgeklappt werden, um die Auflagefläche zu vergrößern. Bei Höchstgeschwindigkeit läuft AMOR allerdings auf den Kugelkuppen der Füße, die einen Gravoprojektor enthalten, so daß der Robot an Wänden und Decken laufen kann. Ultraschallsensoren sorgen für Feinfühligkeit der Füße. Da der Transportrobot meist bei extremen Umweltbedingungen eingesetzt wird, ist es selbstverständlich, daß der Reiter einen Schutzanzug (siehe auch PR-Report 123) trägt. Für Passagiere ohne Schutzkleidung kann über dem Sitz eine Prallfeldglocke projiziert werden. Die Typenbezeichnung AMOR steht für „Achtbeiniger mobiler Robot“. |
|
|
|
|
|
Text & Zeichnung: © by Bernhard Kletzenbauer |