|
www.rz-journal.de - © by Gregor Paulmann und Perry Rhodan - published in PR 2759 - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
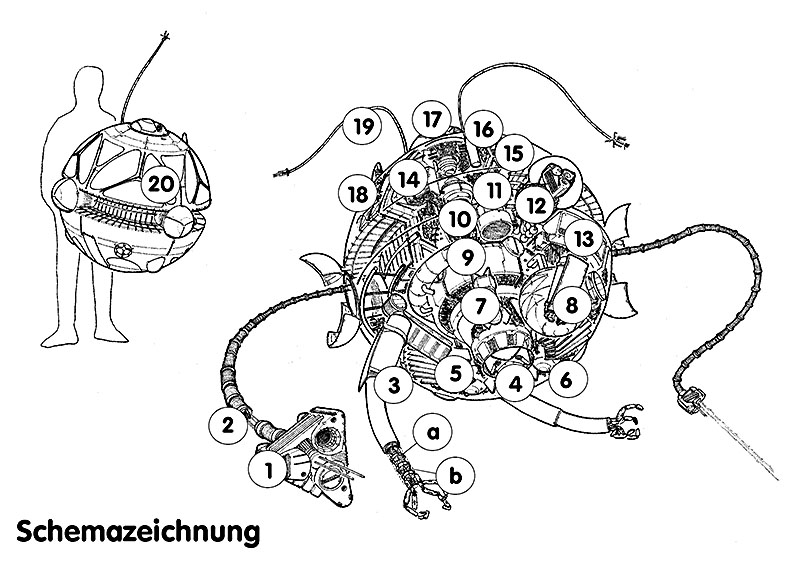
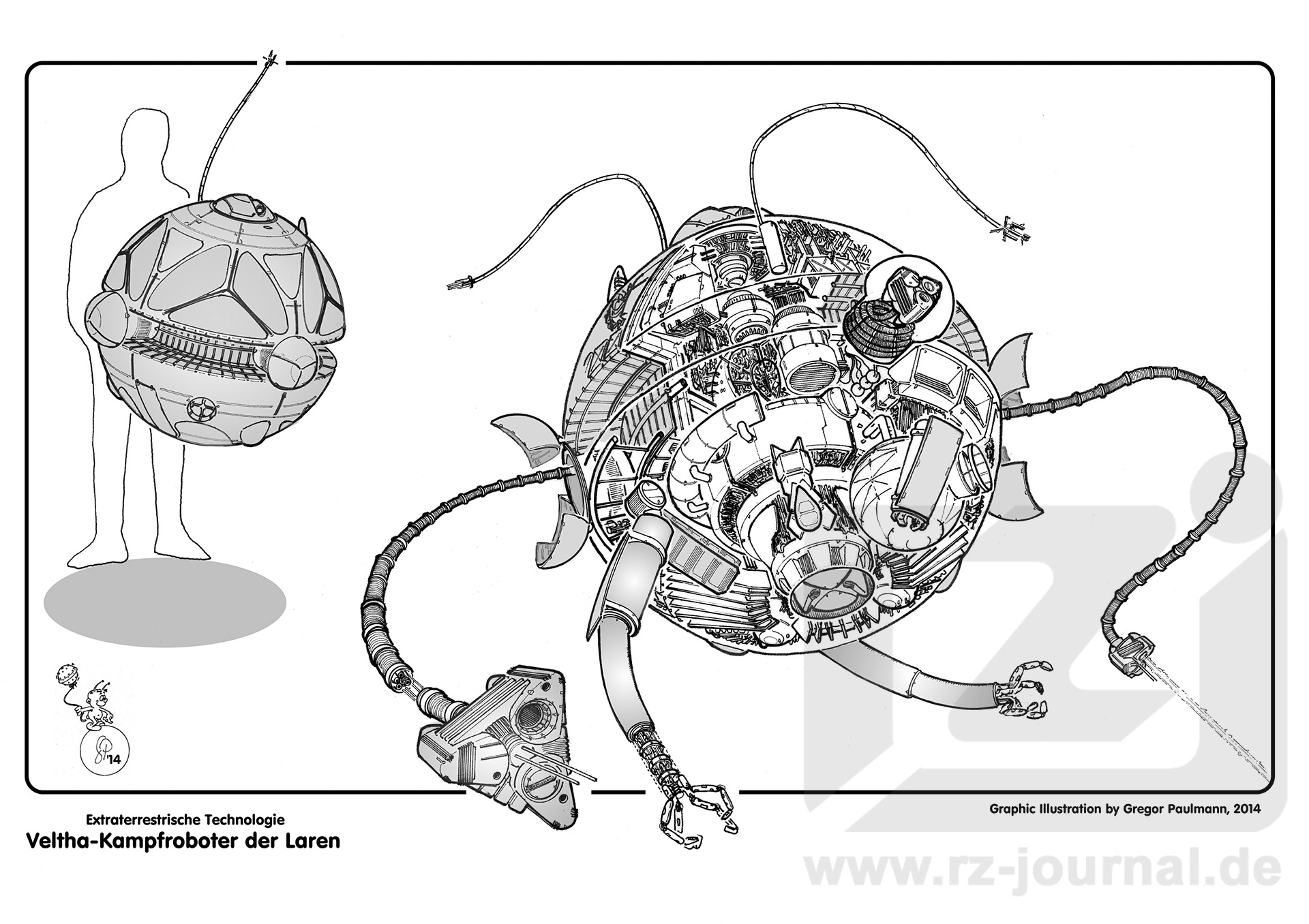
Extraterrestrische
Technik |
|
|
Allgemeines: Dargestellt ist ein typischer Kampfroboter, wie er zur aktuellen Handlungszeit in der Galaxis Larhatoon eingesetzt wird. Der kugelförmige Veltha-Kampfroboter durchmisst rund einen Meter. Er schwebt mithilfe eines Antigravtriebwerks auf Prallfeldkissen, darüber hinaus verfügt die Maschine über eine Art Gravopuls-Antrieb. Die acht tentakelförmigen Arme erfüllen unterschiedliche Funktioen; sie können bis zu eineinhalb Meter weit ausgefahren werden. Vergleicht man ihn mit einem terranischen TARA-Kampfroboter, ist der Veltha zwar deutlisch weniger leistungsfähig, erscheint aber wegen seiner gerinden Größe und Masse agiler. |
|
|
|
|
|
Text & Zeichnung: © Gregor Paulmann |