|
www.rz-journal.de - © by Georg Joergens - published in »Die Terranauten« Band 96 Die
Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit
Genehmigung des Zeichners, und unter Benennung der
Bezugsquelle und des Copyrightinhabers gestattet. |
|
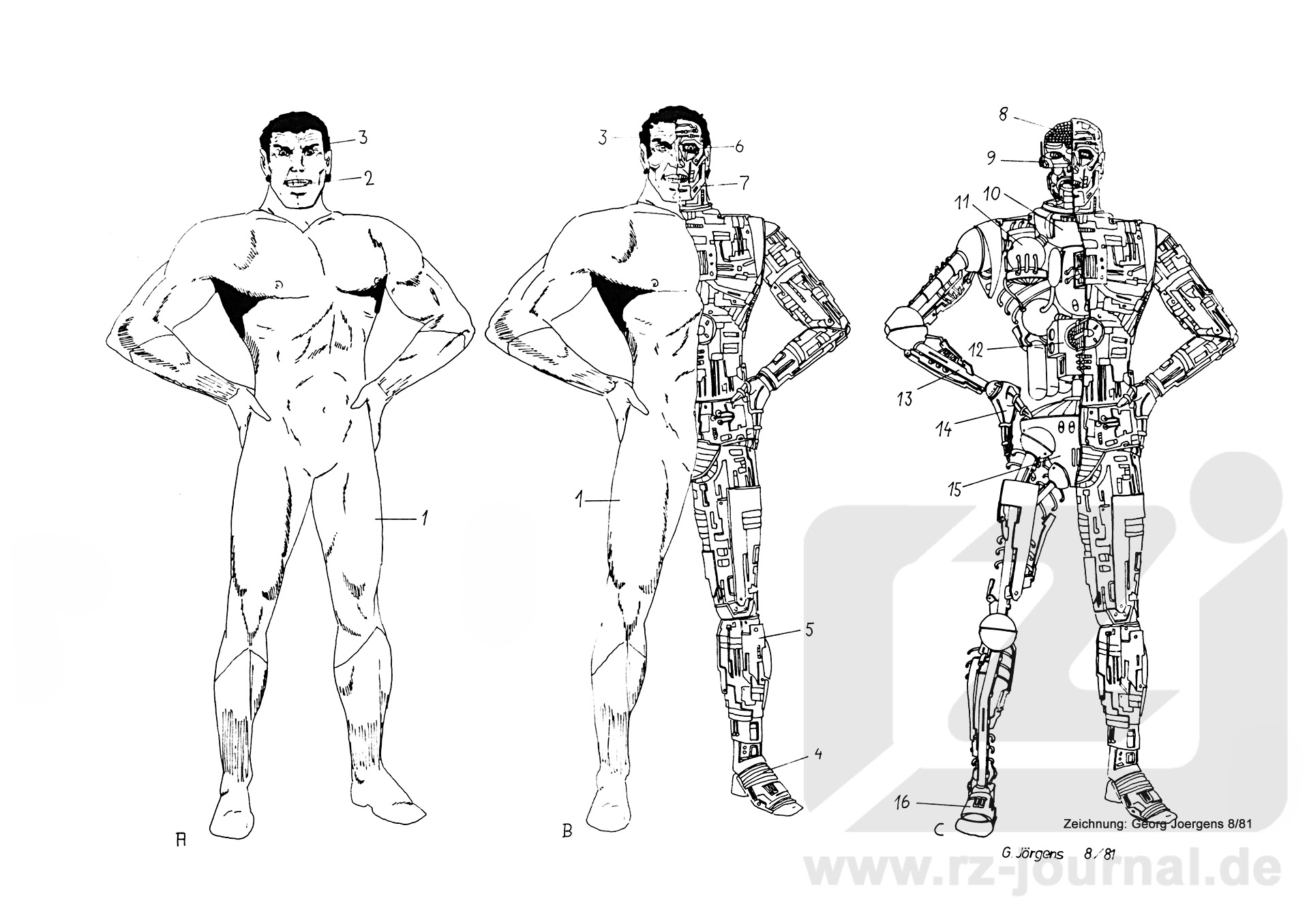
Elektronik-Double |
|
|
|
|
|
Hochqualifizierte Roboter mit extrem empfindlichen Teilen werden oft als Double eingesetzt um bedrohte Manags oder Generalmanags zu schützen. Sie nehmen Ihre Stelle ein und bewahren so das Opfer vor einem Anschlag. Durch eine ausgeklügelte Technik ist es fast unmöglich sie zu –entlarven, da Stimme, Bewegungen und andere Merkmale hundertprozentig dem der Originale entsprechen. Ferner sorgt ein Individualschwingungsgenerator für die persönliche Ausstrahlung und verhindert so auch weitgehenst eiine Entdeckung durch psionische Kräfte. Die Roboter können aber auch mit Sprengstoff versehen werden und somit Ihrerseits als Attentäter auftreten. Dies kann jedoch nur geschehen, wenn die in der Grundprogrammierung enthaltenen drei Robotergesetze, verändert oder gelöscht werden. Ansonsten haben diese Ihre uneingeschränkte Gültigkeit. 1. Gesetz: Ein Roboter darf kein menschliches Wesen verletzten oder durch Untätigkeit gestatten, daß einem menschlichen Wesen Schaden zugefügt wird. 2. Gesetz: Ein Roboter muß den von einem Menschen gegebenen Befehlen gehorchen. Es sei denn, ein solcher Befehl stünde im Widerspruch zu dem 1.Gesetz. 3. Gesetz: Ein Roboter muß seine eigene Existenz beschützen, solange dieser Schutz nicht im Widerspruch zu Gesetz 1 und 2 steht. |
|
|
|
|
Text & Zeichnung: © Georg Joergens 8/'81 |
|