|
Allgemeines:
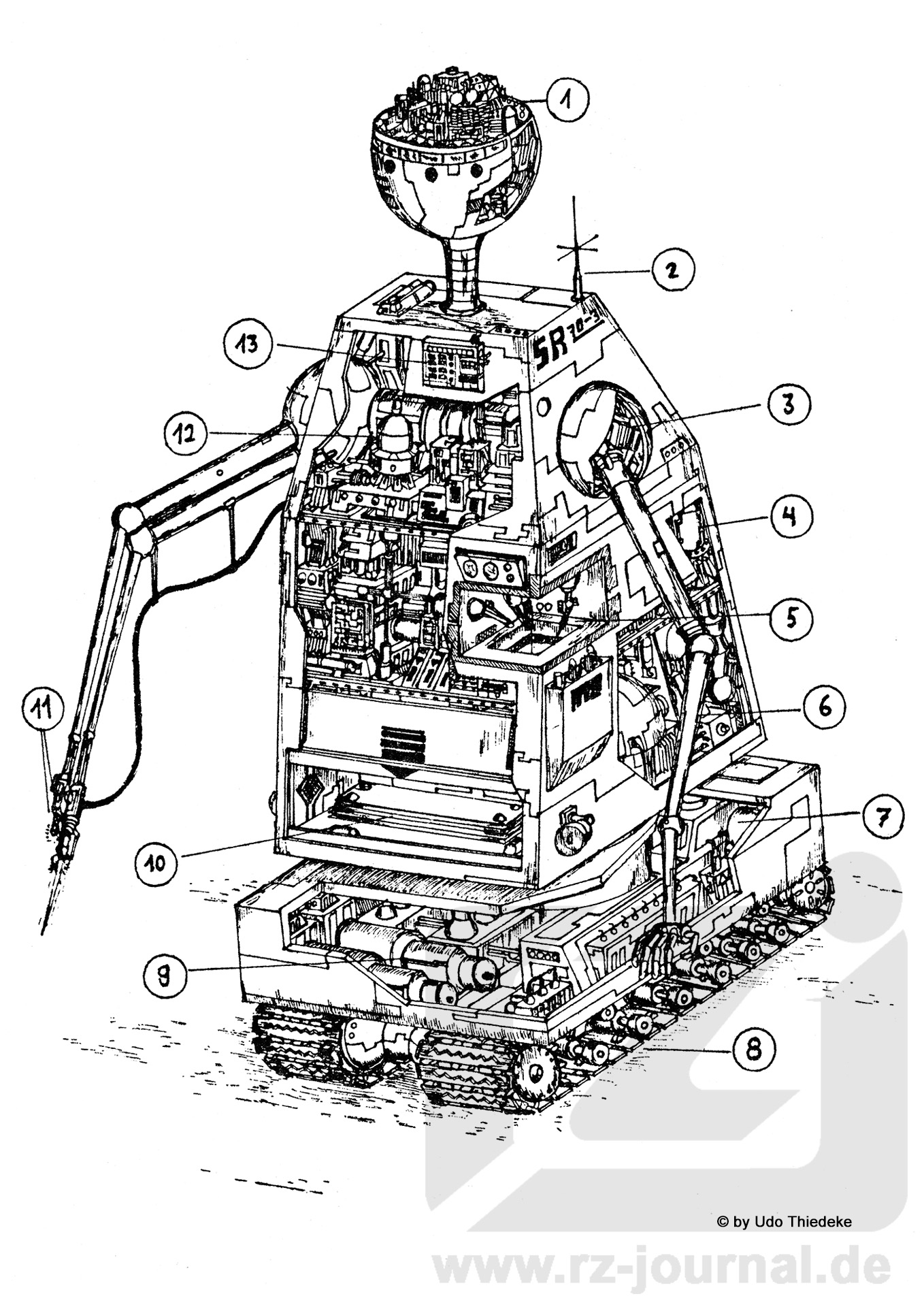
Dieser Reparaturrobot
wurde konstruiert (etwa um 2700), um ein Roboterkonzept eines „kleinen“ Wartungsroboters
zur Verfügung zu haben und gleichzeitig ein universell ersetzbares,
kompatibles System zum Einsatz bringen zu können. Dieser Typ (3 hinter der
Typenklassifizierung) ist hauptsächlich auf Raumschiffwerften anzutreffen, wo
er kleine und kleinste Wartungsarbeiten ausführt. Austauschbar sind bei diesem
Roboter die Arbeitsarme (die gezeigte Version ist mit einer Spezialgreifhand und
einem Laser-Telemetrie-Hochenergie-Schweißgerät ausgerüstet) und der
Fortbewegungsuntersatz. Neben Gleiskettenfahruntersatz ist auch ein Antigrav-
oder Luftkissenfahruntersatz für den Austausch vorhanden. Der Stückpreis
dieses nur 1,70 m großen, bis in die Zeit der Aphilie eingesetzten Roboters
betrug in der Großserienfertigung (Standardmodell SR-70-1) 2000 Solar.
|
-
Positronisches Gehirn
zur Steuerungsrechnung und Memoryspeicherung. Der Kopf Ist auf einen Segmenthals
montiert und somit beliebig schwenkbar, er verfügt über ein 180° optisches
System aus Einzelzellen (QL-350-10 infrar./nor.L.) und einen Ultraschall-
Ortungsprojektor. Der Robot ist nicht zur akustischen Kommunikation ausgelegt.
-
ausgefahrene
Fernsteuerantenne, in diesem Zustand wird der Robot von einem Großrechner über
Funkkanal 350 Befehlsleitungen gesteuert.
-
Kugelgelenk des
Greifarms mit sensomotorischer ' Zug- und Druckkraftregelung von 0,1 bis 10000
Newton.
-
Fusionsreaktor
Energieversorgung Unterdecksantrieb (Energie auch für Drehbewegung des Robots
um 360° auf seinem Gleiskettenuntersatz) siganesisches Erzeugnis.
-
Analysationsschacht,
der Robot kann In diesem Anti-G- Schacht Kleinteile auf Schäden untersuchen und
wiederverwendbare Teile durch den Schacht direkt dem Materialhangar zur
Wiederverwertung zuführen.
-
Greifarm mit
Zwischengelenk Greifbereich stufenlos 360°.
-
Fahrtmotorenenergiezelle
(Kein Reaktor) wiederaufladbar nach 2500 Betriebsstunden bei 70 % Belastung.
|
-
Haftgummi beschichtete
über gedämpfte Einzelräder geführte Gleiskette.
-
Fahrtmotoren
stufenloses Getriebe Vor- und Rückwärtsfahrt max 30 km/h.
-
Material und
Ersatzteilhangar für kleine Mengen Material, der Roboter kann auf diese Weise
Kleinteile direkt an den Einsatzort fahren (hier z. B. einen Satz
Terkonit-Plastverblendungen) und ist somit zum Großteil von Zubringrobots unabhängig.
-
Laser-Telemetrie-
Kamera und Hochenergie- Punktschweiß-Gerät mit regulierbarer Strahlweite von 1
m bis 1 gm und einer Hitzetoleranz zwischen 500° und 7500 C°.
-
Hauptenergieversorgungs-Fusionsreaktor
zur Versorgung des Oberdeckantriebs und der Positronik sowie zur
Energieversorgung des Schweißgeräts.
-
Handprogrammiereinrichtung
mit Magnetkarteninterface, sowie hexadezimale Befehlsanzeige. Die über diese
Einrichtung eingegebenen Programmschablonen stellen allerdings nur 300
verschiedenen Handlungsschemata der Grundprogrammierung dar. Der Robot hat aber
die Möglichkeit 50 000 Verhaltensvorgänge zu speichern und auszuführen
(Sondermodell SR-70-5/e sogar 80 000).
|