|
www.rz-journal.de - © by Michael Hirsch und Perry Rhodan - published in PR 825 LKS - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
Extraterrestrische
Technik |
|
|
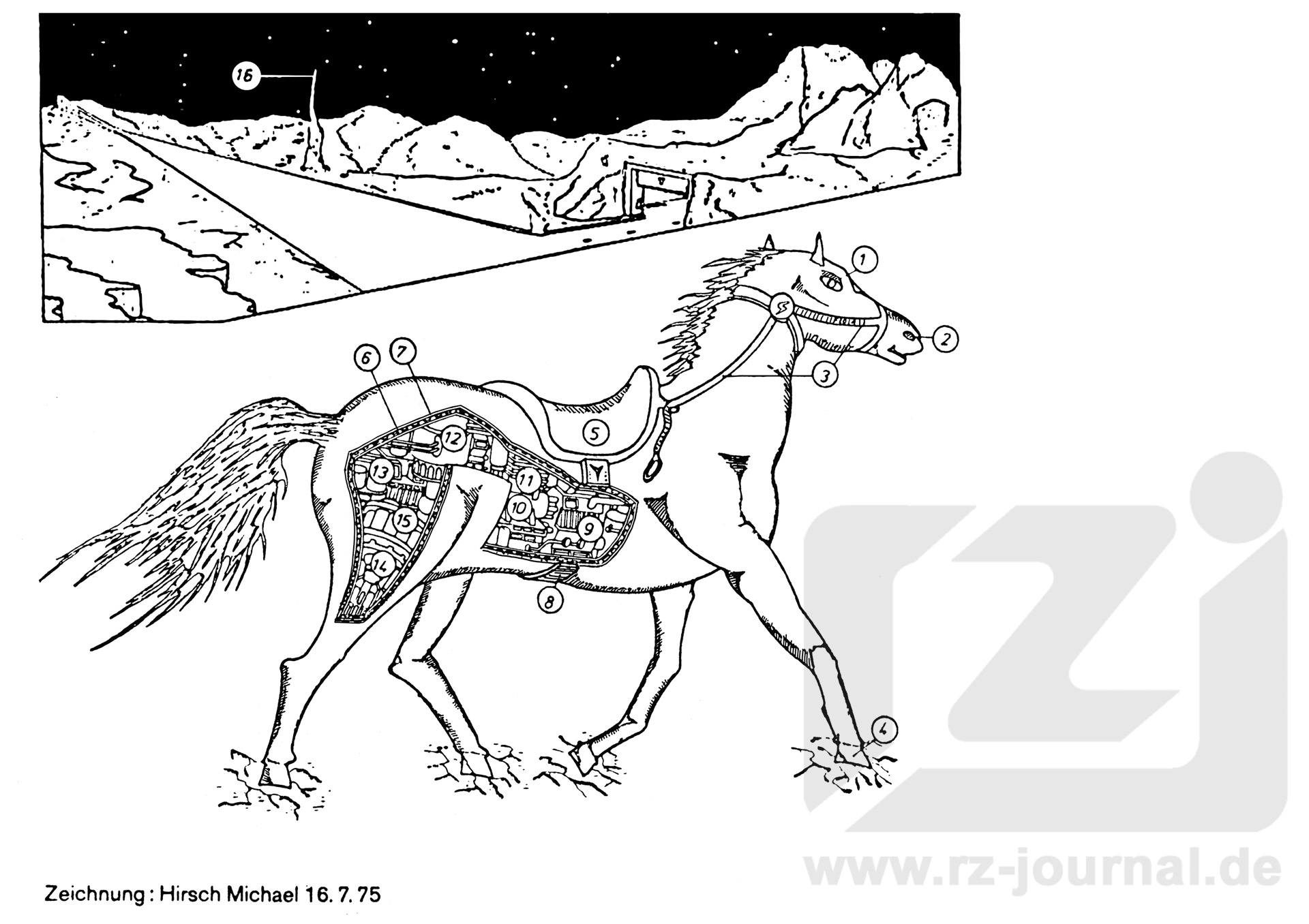
Bei diesem Roboter handelt es sich um eine genaue Nachbildung eines altterranisschen Pferdes. Sie dienten dem auf dem Saturnmond Titan lebendem ersten Hetran Leticron zum Austragen von Turnieren nach Art des terranischen Mittelalters. Die Roboter wurden aber auch zu einem „Gottesgericht“ verwendet, bei dem es auf Mut, Reaktionsschnelle und Kraft des Reiters ankommt. Zu diesem Zweck ließ Leticron eine Felsrampe erbauen, auf der die Reiter ihre Robotpferde bis zur Höchstgeschwindigkeit antreiben, um dann am Ende der Rampe in den freien Raum zu schießen. Hat der Reiter bis zu diesem Zeitpunkt die bei einem Neigungswinkel von 30 Grad gültige Fluchtgeschwindigkeit von ca. 5880 m/sec erreicht, so schwenkt er in einen stabilen Orbit um Titan ein. Wenn nicht, so stürzt das ohne Antigravtriebwerk versehene Pferd ab, und der Aufprall tötet den Reiter und vernichtet den Roboter. Leticron pflegte alle ihm unliebsam gewordenen Leute mit diesem Spiel zu beschäftigen. Gewicht: 12 t (bei 1 g) Höchstgeschwindigkeit: 6 000 m/sec. bei 0,21 g und Atmosphärenlosigkeit. |
|
|
|
|
|
|
|
Text & Zeichnung: © by Michael Hirsch '75 |
|