|
www.rz-journal.de - © by Mark Fleck und Perry Rhodan - published in PR 2259 - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
Terranische Technik Gartenarbeitsroboter |
|
Dieser Roboter wird in zwei Grundvarianten produziert: 1. Gartenroboter mit energetischen Hauptwerkzeugen Typ: A 2. Gartenroboter mit mechanischen Hauptwerkzeugen Typ: B Typ B besitzt im Gegensatz zu Typ A überwiegend mechanische Hauptwerkzeuge, (Rasenmähen und Bodenbearbeitung), die nach Bedarf an die Unterseite des Roboters angekoppelt werden. Die Außenhülle des Roboters ist farbvariabel und kann sich den Wünschen des Besitzers individuell anpassen. Ebenso können alle nötigen mechanischen Werkzeuge generiert werden (z.B. Gartenschere, Schaufel sowie Bewässerungsdüse). Zusätzlich besitzt der S-JT zwei Mikro-Traktorstrahlprojektoren, gleichermaßen für die Bewegung schwererer Lasten wie auch für diffizile Arbeiten wie z. B. Erdaushub und Erdumschichtungen. Im Hauptrumpf des Roboters befinden sich zwei kreisförmige Humustanks in denen alle verwertbaren organischen Abfallprodukte für die spätere Verwertung in komprimierter Form aufbereitet werden. Des weiteren besitzt der Roboter einen Vorratstank für Wasser und biologische Düngestoffe. Die Besonderheit ist der flugfähige Diskusaufsatz durch den auch Arbeiten in schwer zugänglichen Baumkronen ermöglicht werden. Durch ein Schädlings »Bekämpfungsprogramm« kann der Roboter ebenfalls zur Sicherung oder Beseitigung von Schädlichen eingesetzt werden, was nicht unbedingt heißen soll, dass die Schädlinge entsorgt werden, sondern das sie unter Umständen umgesiedelt werden. |
|
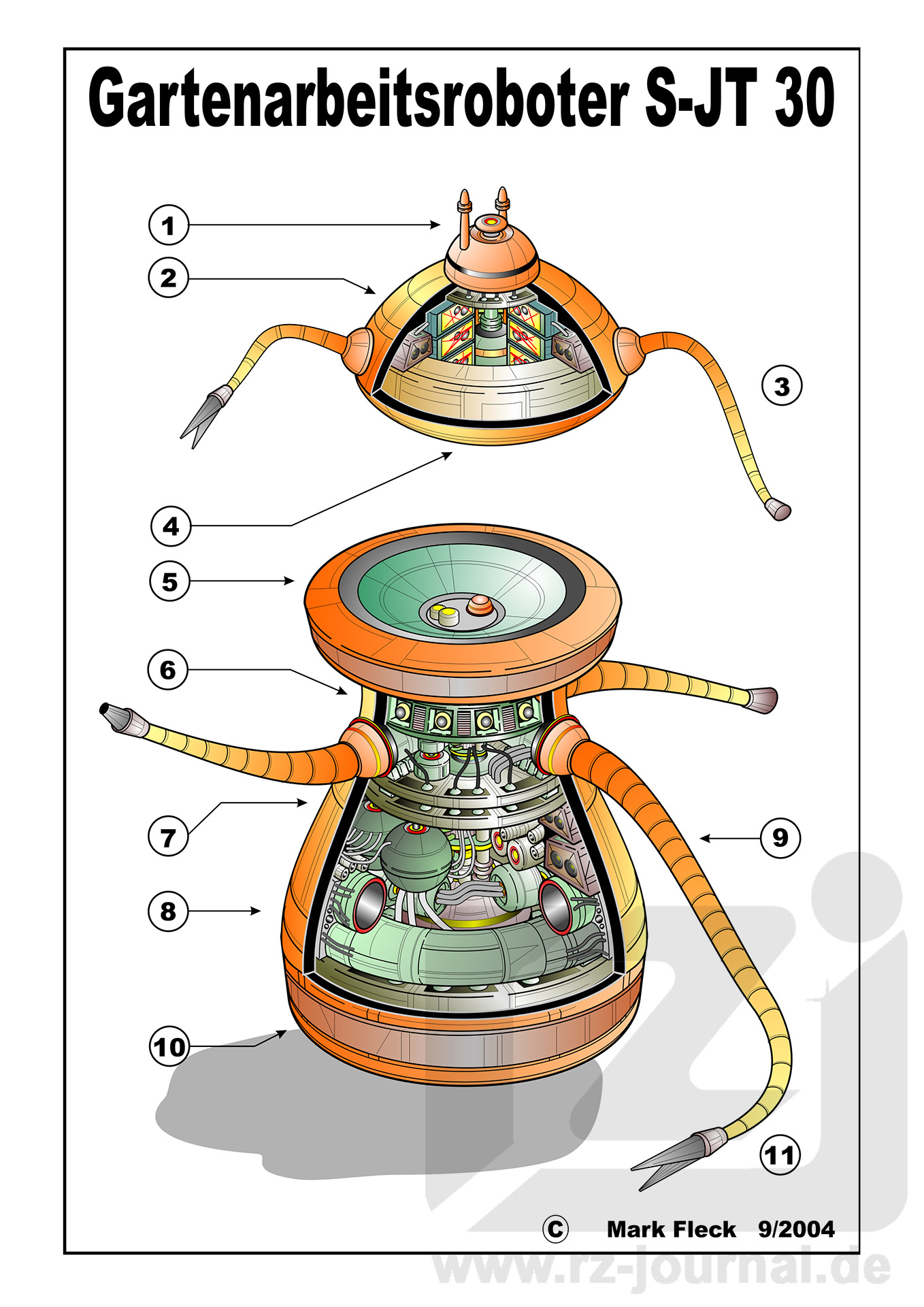
Technische Daten: Basisdurchmesser: 65 cm Höhe ges: 100 cm Durchmesser Diskusmodul: 45 cm
Energieversorgung: Mikro-Fusionskonverter (Verwertung von Abfallpartikeln) Antrieb: Mikro-Antigravtriebwerk und Prallfeldgeneratoren Einrichtungen: farbvariable, teilelastische Hülle vier flexible, ausfahrbare Arme mit formvariablen Handaktivatoren (maximale Länge 3,8 Meter) am Grundkörper sowie zwei Arme am Diskusmodul zwei Präzisions-Traktorstrahlprojektoren Medopack
Legende:
© Text und Zeichnung: Mark Fleck 9/2004 |