|
www.rz-journal.de - © by Georg Joergens und Perry Rhodan - published in PR 2935 - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
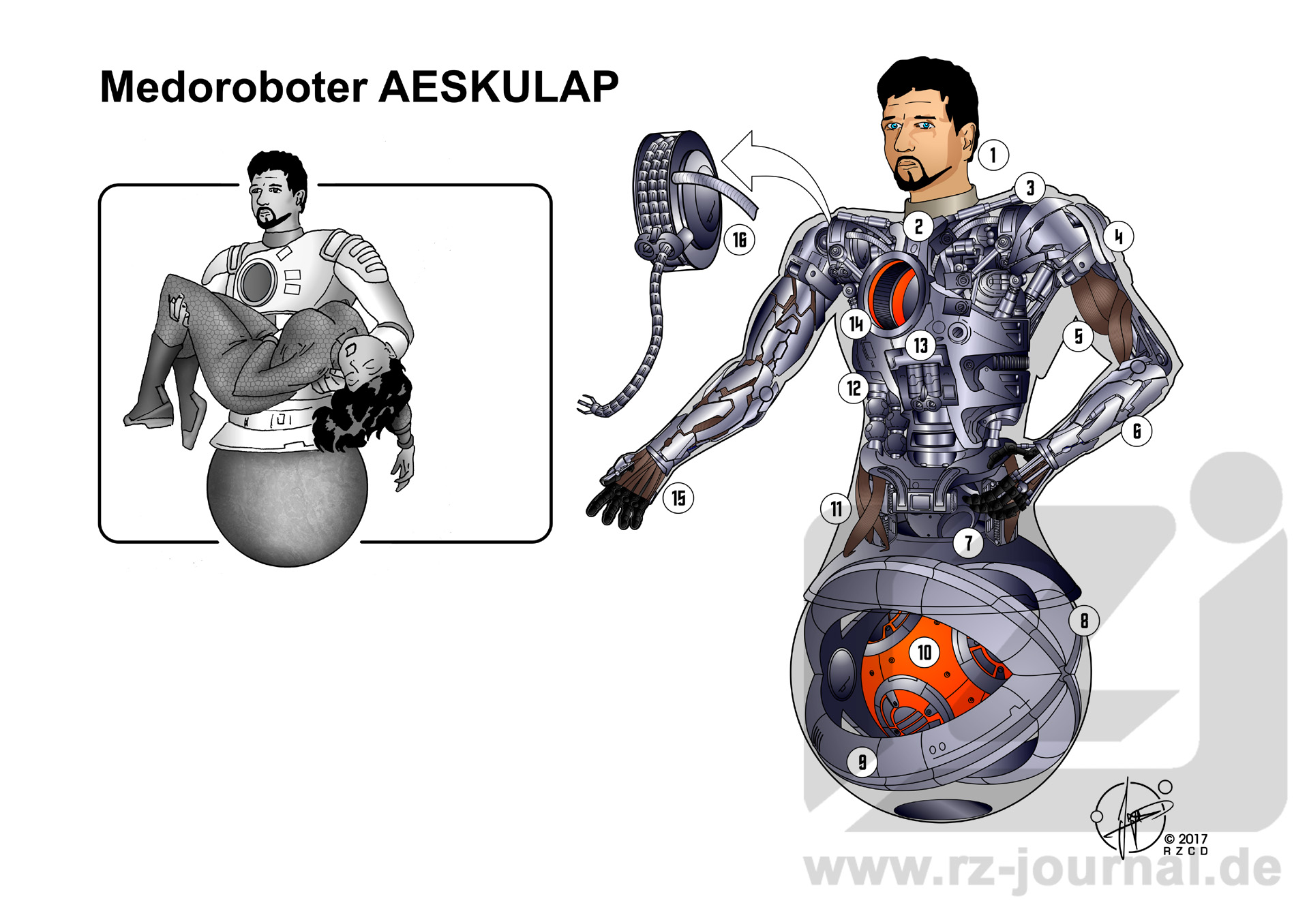
Medoroboter |
|
Dieser Roboter wirkt, anders als die fremdartigen TARAS, vertrauenerweckend, human und verfügt über ein ausdrucksstarkes Gesicht. Der Körper ist mit Biomolplast überzogen, um einen natürlichen Eindruck zu vermitteln. Seine Hände sind menschlich geformt und mit hochempfindlichen Sensoren ausgestattet. Er verfügt eine umfangreiche Datenbank für seine Diagnosen und kann sich im Bedarfsfall auch mit jedem verfügbaren Netz verlinken, um Zugriff auf zusätzliche Informationen zu erhalten. Zur Diagnose kann er auf ein integriertes Laborsegment zurückgreifen, und er ist dafür ausgelegt, sowohl einfache (mikro-)chirurgische wie auch plastische Eingriffe vorzunehmen. Ein Gravopak sorgt für schwerelosen Vortrieb über Hindernisse. Meist bewegt er sich aber energiesparend mittels seines kugelgelagerten Basissegments voran. |
|
|
|
Legende:
|
|
Text und Zeichnung: © Georg Joergens 07/2017 |