|
www.rz-journal.de
- © by Gregor Paulmann & Christoph Ankzykowski und Perry Rhodan - published in PR
3259 Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
Galaktische Technik |
|
|
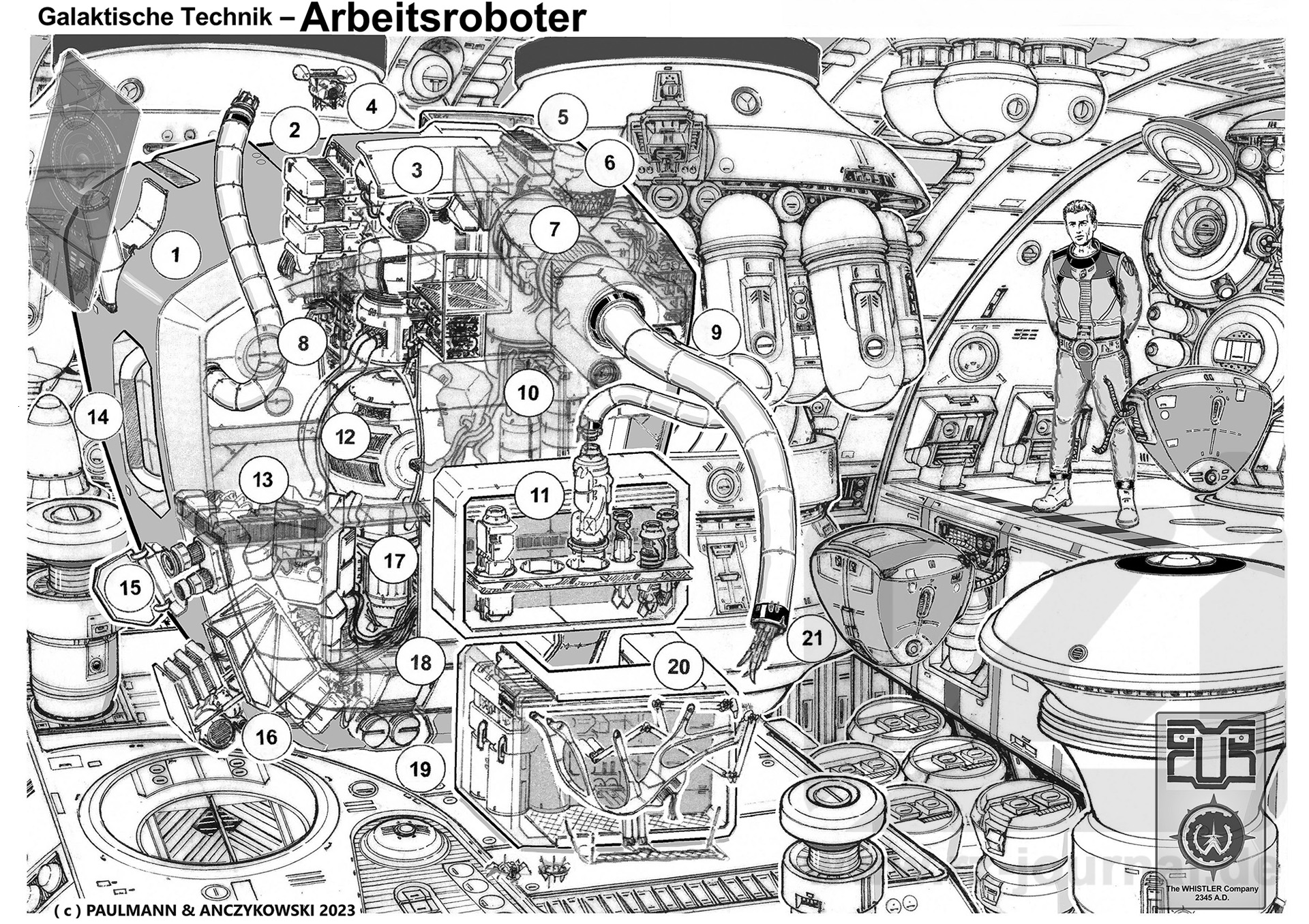
Allgemeines: Unauffällig, effizient und robust – dies sind im Wesentlichen die Eigenschaften eines Arbeitsroboters. Er wird
immer dann herangezogen, wenn die Arbeiten körperlich hoch belastend, gefährlich und umfangreich sind –
oder man einfach keine Lust hat, es selbst zu tun. Arbeitsroboter gibt es in einer unglaublichen Vielzahl von
Typen und Ausführungen, dabei sind sie entweder hoch spezialisiert oder eher als Generalisten ausgelegt.
Technische Daten RUR & Shom CHRYS-70/1650-MRO/DC (Instandsetzung und Schadenskontrolle): Abmessungen: 1,2x1,2x0,7 Meter; Trägerstruktur (Chassis) aus Metallplastik, Masse (ausgerüstet) 68 Kilogramm Flugfähig, Einsatztemperaturen von –273 bis + 560 °C (mit Schutzschirm bis +5100 °C); vakuumfest; wasserdicht; salz- und säurehaltige Atmosphären mit bis zu 200 bar Außendruck; maximal 280 Kilogramm Traglast unter 6 Gravos; Ausdauer der Energiespeicher bei 100 Prozent Belastung: etwa 48 Stunden |
|
|
|
|
|
|
|
Text & Zeichnung:: Christoph Anczykowski & Gregor Paulmann, 2023 |
|