|
www.rz-journal.de - © by André Höller und Perry Rhodan - published in PR 1416 - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
Roboter
Teil 3 |
|
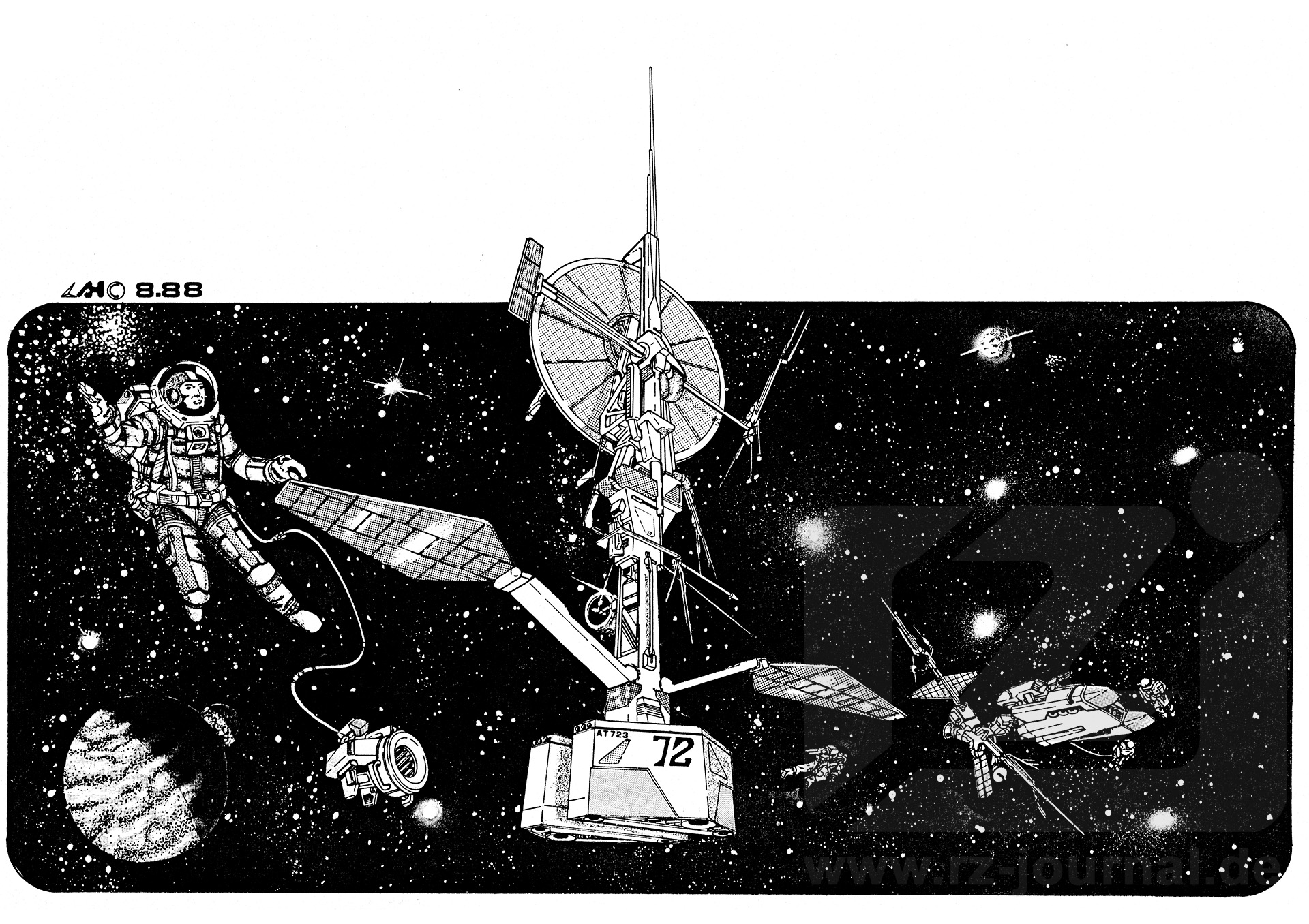
Für die Erforschung, Analysierung und Vermessung von Planetensystemen und sonstigen kosmischen Erscheinungen werden Meßautomaten schon seit Beginn der terranischen Raumfahrt vereinzelt eingesetzt. Solche Meßsonden unterstützen den Raumfahrer bei seiner Arbeit im All. Wurden früher, zu Beginn der terranischen Raumfahrt, Erstellungen von Raumkarten noch von Vermessungstechnikern in jahrelanger, monotoner Arbeit von Hand durchgeführt, so übernahmen die Meßroboter nur wenige Jahre später deren Aufgaben. Der Meßroboter ist bei seiner Arbeit viel schneller und genauer als sein menschlicher Kollege-denn er kennt keine Ruhepausen. Die Aufgaben solcher Meßautomaten umfassen nicht nur die Vermessung von Raumquadranten, sondern auch die Erforschung von Planeten und deren Trabanten. Es werden dabei die Oberfläche, die Bodenstruktur sowie die Atmosphäre (falls eine vorhanden ist) der Himmelskörper auf ihre Parameter analysiert. Die Meßroboter werden von Einsatzeinheiten in ihrem Exkursionsgebiet ausgesetzt und nach Beendigung der Operation, welche je nach der Größe des zu erforschenden Gebietes ein bis zwei Jahre in Anspruch nimmt, wieder eingesammelt. Auch bei den terranischen Explorer-Kommandos werden solche Roboter als SCOUT-Sonden gerne eingesetzt, um mögliche Gefahren rechtzeitig zu erkennen. Das Datenblatt zeigt eine Meßsonde vom Typ ATLAS, deren Aufgabe darin bestand, das Minerva- Sonnensytem zu kartographieren. Der Meßroboter wird von zwei beweglichen Gravopuls-Packs angegeben, welche sich am unteren Teil der Sonde befinden. Mit diesem Antriebssystem sind Hyperraumflüge nicht möglich. Im mittleren Teil der Sonde befinden sich zwei bewegliche Solar-Acculator-Paddel für die Energiegewinnung. Das obere Teilstück des Roboters ist mit einer Vielzahl von Meß- und Analyseperipherien ausgestattet. Zur Datenübertragung sowie zur Messung von Strahlung im elektromagnetischen Spektrum dient ein 1,5 Meter durchmessender Parabolspiegel. Der Meßautomat Marke ATLAS hat eine Gesamthöhe von 5,8 Meter. Auf der linken Seite der Darstellung erkennt man einen Raumfahrer des technischen Hilfsdienstes beim Anflug auf die Raumsonde. Der Astronaut hat einen schweren Raumanzug Typ SERUN an. Dieser Anzug ist mit einem Turbo-Gravopuls-Rucksack ausgestattet, der dem Astronauten eine ungestörte Bewegungsmöglichkeit im All erlaubt. An einer Schleppleine führt der Kosmonaut ein kleines Power-Modul mit einem internen Gravopuls-Drive mit. Dieses Modul dient zum Transport von aufgelesenen Meßeinheiten, deren Energien vollständig erschöpft sind. Die Sonden werden dann mit Hilfe des Power-Moduls zum SPACE-TUG (Raumschlepper) gebracht und an dessen Heck verankert. Mit Hilfe des Schleppers gelangen die Meßroboter nach einer gründlichen Inspektion zu ihrem nächsten Einsatzort. |
|
Text und Zeichnung: André Höller 8/88 |